 Encyclopædia Neurochirurgica
Encyclopædia Neurochirurgica
 Stimulation cérébrale profonde dans le traitement de la maladie de Parkinson
Stimulation cérébrale profonde dans le traitement de la maladie de Parkinson


*c. Précision mécanique des instruments
La capacité de nos instruments à atteindre la cible calculée et recalée dans l’espace stéréotaxique doit être également évalué et peut être également source d’erreur de position des instruments et, dans le cas particulier de la SCP, des électrodes.
Les cadres associés à leur arc dédié ont chacun une précision propre (exemple l’arc de Leksell présente une précision moyenne de 0,7mm)(39).
- Cas particulier des Robot stéréotaxiques
Le robot stéréotaxique sert à la fois de console de planning de l’acte stéréotaxique mais également de bras robotisé porte instrument guidé par cette console. La fiabilité mécanique du bras robotisé (en fonction des robots) est au moins égale sinon meilleure qu’un arc avec en outre une facilité d’utilisation accrue37,36,38. Les robots peuvent également intégrer dans leur console de planification toutes les modalités d’imagerie 3D (IRM, TDM, fpCT) mais aussi 2D (téléradiographie et imagerie à capteur plan). Enfin le principal intérêt des robots stéréotaxiques est la possibilité (lorsqu’ils sont couplés avec une imagerie per opératoire de qualité) de corriger de manière simple la position du bras du robot si une erreur entre la planification et la position des instruments est objectivée en per opératoire.

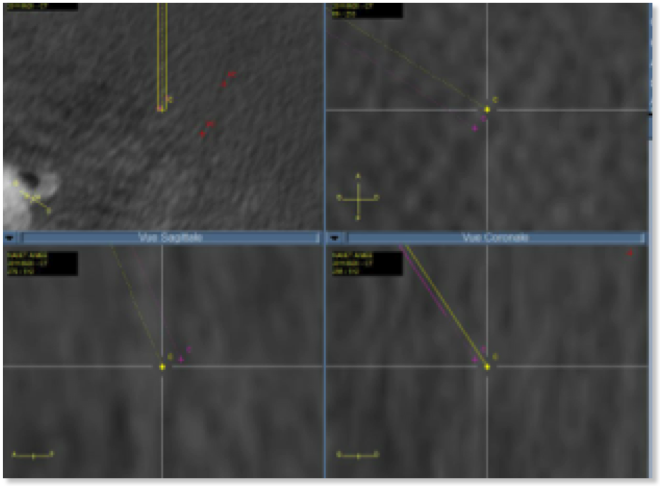


Grace à l’imagerie per-opératoire, une erreur dans le positionnement du tube guide est objectivé et mesuré. La correction est apportée sur le bras du robot. Lors de la mise en place des micro-électrodes, l’électrode centrale suit parfaitement le trajet planifié objectivant que l’erreur a été corrigée.

Exemple d’intégration multimodale telle qu’utilisée au CHRU de Lille